
< Home
Architecture Overview
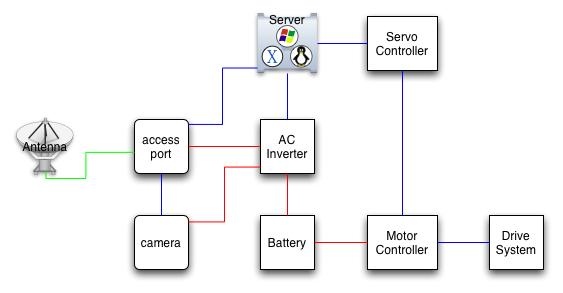
Below is the general system diagram of the robot. The client would be in a remote location.
Server Overview
The server will consist of daemons for *nix platforms such as Linux and OSX. There will also be server programs for Windows, including the Pocket PC.
The server expects access to camera on /dev/video, a serial port on /dev/ttyS0, and an LPT port on 0x378. Other than that, it should run on any flavor of linux.
Client Overview
The IP address of the robot can be passed on the command line.
Key control is as follows:
- 1-5: Speed control
- W: Forward
- S: Back
- A: Rotate left
- D: Rotate Right
- Q: Forward left
- E: Forward Right
- Z: Camera left full
- X: Camera center
- C: Camera right full
- L: Toggle logging
- P: Toggle display of log
- T: Enable object tracking
- M: Toggle mouse tracing
- V: View tracking buffer
Motion controller:
The motion controller is just a serial device that abstracts the control system from the computer.
The movement is modified with a simple command set (in acsii)
- r: reset controller
- s: Servo position.
Send S followed by ABCD where AB is the position of the pan servo 0-255 in HEX and CD is the position of the tilt servo.
- m: Motor control
Send M followed by ABCD. AB is the speed and direction of the left motor and CD is for right.
Motor data:
- 0x00 is stop.
- 0x80 is reverse.
- 0x01 - 0x10 are the speeds.
You or with reverse to move at different speeds in the reverse direction.